
Un «servo» o «servomotor» es un dispositivo similar a un motor de corriente continua, pero al que se le ha añadido la electrónica y mecanismos necesarios para que pueda moverse y permanecer en una posición fija, dentro de un rango de movimiento específico, normalmente de 180º.
Dado que es un dispositivo pequeño, con un controlador de movimiento incluído, los aficionados a la robótica comenzaron a «modificar» estos servos para que fueran capaces de moverse 360º y poderlos usar como motores para mover ruedas, hélices, etc. Los fabricantes vieron esa necesidad y comenzaron a distribuir servos de este tipo.
Sin embargo, cuando se modifica un «servo» para que rote 360º, éstos pierden toda su precisión. Aún así, para pequeños proyectos de robótica se utilizan por su sencillez y bajo precio.
Como el controlador original de un servo hace que éste se quede en una posición fija entre 0º y 180º. En un servo de giro continuo se utilizará este valor de posición final para hacer que el servo rote (de forma continua) en sentido horario o en sentido antihorario y distinta velocidad. En la siguiente ilustración vemos el efecto que tendría sobre el servo el fijarle una posición u otra:
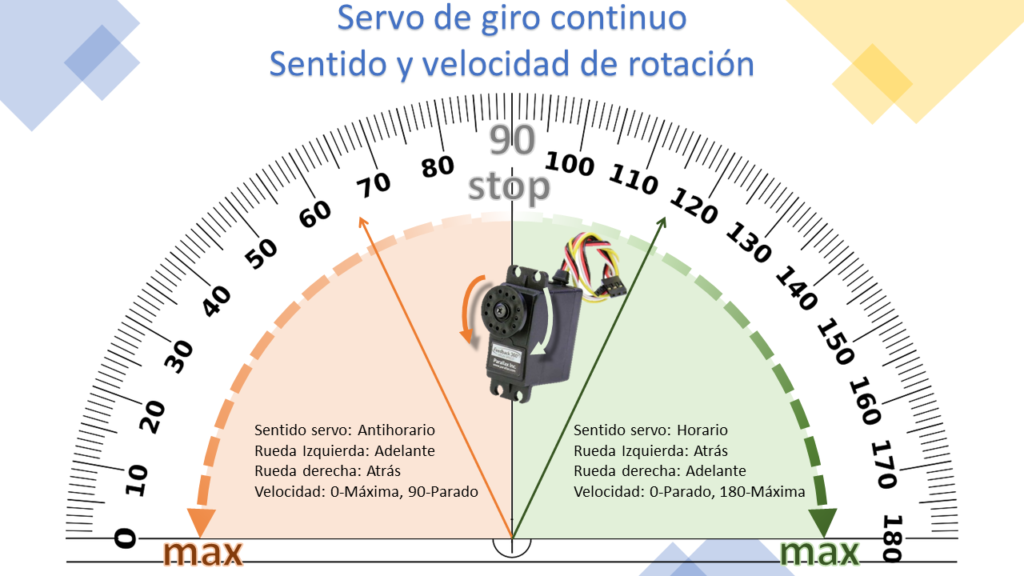
Sentido y velocidad de rotación de un servo de giro continuo by Antonio Zamora. Licensed under CC BY-ND 4.0![]()
![]()
![]()
Para entender el mecanismo, supongamos que queremos mover un coche usando dos de estos servos, que situaremos a cada lado del vehículo, con su respectiva rueda fijada en ellos.
Para hacer que el vehículo se mueva tenemos que fijar los valores para los servos de las ruedas izquierda y derecha teniendo en cuenta la imagen anterior.
Con los siguientes valores, el coche se moverá a máxima velocidad de la siguiente forma:
- Adelante: Servo izquierdo con un valor 0, servo derecho con un valor 180.
- Atrás: Servo izquierdo con un valor 180, servo derecho con un valor 0.
- Rota a la izquierda: Servo izquierdo con un valor 0, servo derecho con un valor 0.
- Rota a la derecha: Servo izquierdo con un valor 180, servo derecho con un valor 180.
Si no queremos que el coche rote sobre el eje que une las ruedas, sino que gire mientras avanza, hay que poner el valor ambos servos para que ambas ruedas giren hacia delante (servo izquierdo de 90 a 0 y servo derecho de 90 a 180), pero a distinta velocidad, según hacia dónde queramos que gire.
Por ejemplo, para que el coche avance mientras gira a la derecha, podríamos dar el valor «60» al servo de la rueda izquierda y el valor «140» al servo de la rueda derecha.
Completa la actividad para determinar hacia dónde se mueve este coche según los valores fijados para los servos.
[h5p id=»2″]
Este artículo está licenciado balo los términos CC BY-SA 4.0
Contenido propio y basado en el artículo: Servomotor – Wikipedia


{kind=link}